Actuator yang mana? Nama yang sedikit asing. Tetapi jika saya memberi Anda sebuah contoh, Anda akan mengetahuinya dengan sangat baik. Pernahkah Anda mendengar tentang Dynamo pada Tamiya? Nama aslinya adalah motor DC, tetapi ini adalah contoh actuator yang sering disebut dinamo.
Aktuator sendiri merupakan komponen yang mengubah energi listrik menjadi mekanik (gerak). Apa tujuan dari aktuator ? Robot menggunakan aktuator untuk menggerakkan robot. Untuk robot beroda, aktuator yang digunakan biasanya berupa motor DC yang dikopel dengan roda. Dan robot dapat bergerak ke arah yang diinginkan.
Aktuator dapat dibagi menjadi dua jenis. Ada jenis yang berputar atau bergerak berdasarkan rotasi. Ada juga actuator linier yang bergerak secara lurus.
1.Yang bergerak berdasarkan rotasi ada:
1. DC Motor
Ini adalah jenis penggerak yang menggunakan arus searah (DC) sebagai energi. Arus searah ini digunakan oleh kumparan internal dan menjadi energi mekanik. Kumparan disebut stator (bagian yang tidak berputar) dan bagian yang berputar disebut rotor.
2. Geared DC Motor
Ini adalah evolusi dari motor DC, perbedaannya adalah penambahan unit Gear ke motor. Gear ini digunakan untuk menambah torsi (daya) motor, atau juga menambah kecepatan.
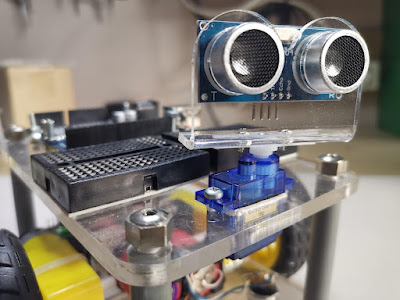
3. Motor Servo
Merupakan perkembangan dari motor DC dan memiliki Gear, namun bedanya motor servo dapat diatur kecepatannya. Di dalamnya ada potensiometer dan motor sehingga bisa diatur derajatnya. Motor servo dapat digunakan untuk membuat robot berkaki.
4. Smart Servo
Perkembangan motor servo, atau jenis motor servo yang lebih cerdas. Dimana sudah memiliki controller sendiri. Ada sistem umpan balik yang dapat dipasang antar Servo, tidak harus langsung pada controller. Untuk membuat robot humanoid, atau robot yang membutuhkan banyak servo tetapi memiliki pin yang sedikit , ini adalah pilihan yang tepat.
5. Motor Stepper
Prinsip pengoperasian motor stepper sama dengan motor DC, keduanya menggunakan arus searah (DC). Namun, Stepper tidak berputar 360 derajat dalam satu langkah, melainkan berputar dalam beberapa langkah. Untuk memutar 360 derajat, langkah pertama 45 derajat dan lanjutkan 45 derajat dan seterusnya. Tergantung dari jenis dan spesifikasi motor stepper.
6. Geared Motor Stepper
Evolusi motor stepper dengan penambahan Gears pada motor. Roda gigi digunakan untuk meningkatkan torsi atau tenaga motor.
2. Yang bergerak berdasarkan linear ada:
1. Linier Actuator
Seperti namanya, gerak linier aktuator adalah jenis motor DC yang bergerak secara linier atau maju mundur. Gerak bolak-balik diperoleh dari gerak roda gigi dengan motor DC berputar. Linear Actuator tentu saja juga memiliki umpan balik yang dikirim ke controller, yang menyederhanakan kontrol.
2. Solenoid
Adalah kumparan yang dililit memanjang dan panjangnya jauh lebih besar dari diameter kawat. Yang membedakan elektromagnetik dari aktuator linier adalah bahwa mereka tidak menggunakan motor DC atau roda gigi untuk menghasilkan gerakan linier, tetapi sebenarnya berbeda bentuk, bentuk yang dirancang untuk dapat bergerak secara linier. Elektromagnet dalam aplikasi sehari-hari sering digunakan untuk kunci pintu otomatis.
3. Muscle Wire
Merupakan jenis kawat otot yang biasa digunakan pada tangan robot. Fungsinya untuk menggerakkan jari-jari robot.
4. Pneumatic
Merupakan jenis aktuator yang menggunakan tekanan udara untuk menghasilkan gerak mekanis linier. Adapun penerapannya, udara tekan digunakan untuk tugas-tugas ringan, seperti pada pintu bus.
5. Hydraulic
Ini adalah jenis aktuator yang mirip dengan pneumatik kecuali hidrolika menggunakan cairan atau oli yang digunakan untuk membuat gerakan mekanis. Dan untuk aplikasinya, Compressed air juga sering digunakan untuk pekerjaan heavy-duty di industri. Bila tertarik belajar Robotik bisa kunjungi Racer Robotic . Kami harap artikel ini akan memberi Anda wawasan tentang robotika.













Komentar
Posting Komentar